



版權(quán)說明:本文檔由用戶提供并上傳,收益歸屬內(nèi)容提供方,若內(nèi)容存在侵權(quán),請(qǐng)進(jìn)行舉報(bào)或認(rèn)領(lǐng)
文檔簡(jiǎn)介
1、智能超聲波避障小車姓名: 班級(jí): 學(xué)號(hào): 目錄摘要.3一、總體方案概述.3二、總體電路原理圖.3三、各模塊功能介紹.4(一)、超聲波測(cè)距模塊.4(二)、步進(jìn)電機(jī)控制模塊.5(三)、單片機(jī)控制模塊.6四、系統(tǒng)軟件設(shè)計(jì).6五、應(yīng)用前景.7六、參考文獻(xiàn).8摘要:現(xiàn)今發(fā)達(dá)的交通在給人們帶來便捷的同時(shí)也帶來了許多的交通事故。發(fā)生交通事故的因素有很多。當(dāng)然,如果我們的汽車能夠更加智能,就是說事先能預(yù)測(cè)并顯示前面障礙物離車的距離,當(dāng)障礙物距離很近時(shí)汽車會(huì)自動(dòng)采取一些措施避開障礙物,這樣就能夠在很大程度上避免這些事故的發(fā)生。在本論文中,我們將會(huì)看到能夠?qū)崿F(xiàn)這一功能的智能小車。關(guān)鍵字:超聲波、測(cè)量、避障、單片機(jī)
2、一、總體方案概述本小車使用一臺(tái)AT89S51單片機(jī)作為主控芯片,它通過超聲波測(cè)距來獲取小車距離障礙物的距離,并且用數(shù)碼管實(shí)時(shí)的顯示出來,在小車與障礙物的距離小于安全距離(用軟件設(shè)定)時(shí),小車會(huì)發(fā)出“在距您車前方x(數(shù)碼顯示的實(shí)時(shí)距離)米的地方有一障礙物,請(qǐng)您注意避讓”的語音提示,并且拐彎,以避開障礙物,同時(shí)會(huì)點(diǎn)亮相應(yīng)側(cè)邊的發(fā)光二極管作為提示信號(hào)。在避開障礙物后,小車會(huì)沿直線前進(jìn)。圖1:智能小車簡(jiǎn)要原理框架圖本系統(tǒng)設(shè)計(jì)的簡(jiǎn)易智能小車分為幾個(gè)模塊:?jiǎn)纹瑱C(jī)控制系統(tǒng)、超聲波路面檢測(cè)系統(tǒng)、前進(jìn)、轉(zhuǎn)彎控制電機(jī)以及方向指示燈系統(tǒng)。它們之間的相互關(guān)系如下圖1所示。二、總體電路原理圖三、各模塊功能介紹(一)、超
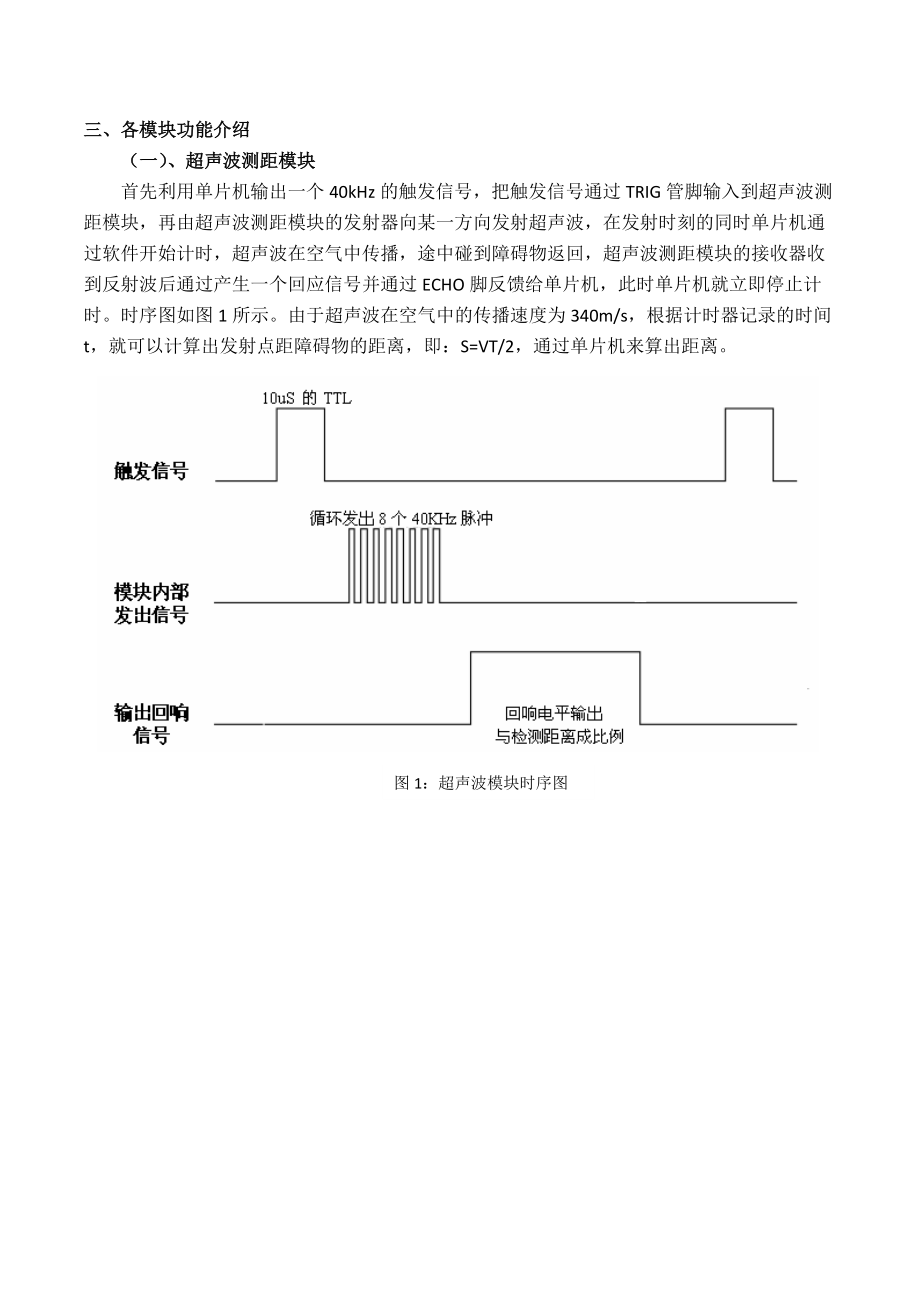
3、聲波測(cè)距模塊圖1:超聲波模塊時(shí)序圖首先利用單片機(jī)輸出一個(gè)40kHz的觸發(fā)信號(hào),把觸發(fā)信號(hào)通過TRIG管腳輸入到超聲波測(cè)距模塊,再由超聲波測(cè)距模塊的發(fā)射器向某一方向發(fā)射超聲波,在發(fā)射時(shí)刻的同時(shí)單片機(jī)通過軟件開始計(jì)時(shí),超聲波在空氣中傳播,途中碰到障礙物返回,超聲波測(cè)距模塊的接收器收到反射波后通過產(chǎn)生一個(gè)回應(yīng)信號(hào)并通過ECHO腳反饋給單片機(jī),此時(shí)單片機(jī)就立即停止計(jì)時(shí)。時(shí)序圖如圖1所示。由于超聲波在空氣中的傳播速度為340m/s,根據(jù)計(jì)時(shí)器記錄的時(shí)間t,就可以計(jì)算出發(fā)射點(diǎn)距障礙物的距離,即:S=VT/2,通過單片機(jī)來算出距離。(二)、步進(jìn)電機(jī)控制模塊此模塊是用來作為小車前進(jìn)的動(dòng)力和控制小車的避障。圖4
4、:步進(jìn)電機(jī)驅(qū)動(dòng)模塊原理圖步進(jìn)電機(jī)是通過脈沖來驅(qū)動(dòng)的,其步距角和轉(zhuǎn)速只與輸入的脈沖頻率有關(guān),頻率越快,其轉(zhuǎn)速越快,因此,只需要控制驅(qū)動(dòng)步進(jìn)電機(jī)的脈沖頻率來控制步進(jìn)電機(jī)的工作,而步進(jìn)電機(jī)的驅(qū)動(dòng)脈沖可以通過單片機(jī)來輸出。但由于步進(jìn)電機(jī)工作時(shí)需要較大的工作電流,因此需要用步進(jìn)電機(jī)驅(qū)動(dòng)芯片來驅(qū)動(dòng),如圖4所示,我們用ULN2803芯片來驅(qū)動(dòng)步進(jìn)電機(jī),并且用單片機(jī)的P0 I/O口來給ULN2803芯片輸入不同頻率的脈沖,再通過ULN2803來驅(qū)動(dòng)步進(jìn)電機(jī)。本小車使用的是兩個(gè)四相五線的步進(jìn)電機(jī)來驅(qū)動(dòng)。我們知道,四相五線步進(jìn)電機(jī)共有五根線,其中紅色的接電源的正極,剩下的四根分別接在了ULN2803芯片的四個(gè)輸出
5、端,其對(duì)應(yīng)的輸入端則接在了單片機(jī)的P1.0P1.3端口,要使電機(jī)工作,則只需讓四個(gè)I/O口依次輸出高電平。電機(jī)勵(lì)磁表如下所示:勵(lì)磁順序AABB11000201003001040001小車的前面兩個(gè)輪子分別用兩個(gè)步進(jìn)電機(jī)來驅(qū)動(dòng),當(dāng)兩個(gè)步進(jìn)電機(jī)的轉(zhuǎn)速一樣的時(shí)候,車子將沿直線前進(jìn),而兩個(gè)步進(jìn)電機(jī)的轉(zhuǎn)速不一樣的時(shí)候,車子就會(huì)拐彎,例如,左邊的步進(jìn)電機(jī)轉(zhuǎn)速比右邊的快的話,車子將向右邊拐彎,只要控制好兩個(gè)步進(jìn)電機(jī)的轉(zhuǎn)速比和不同轉(zhuǎn)速的時(shí)間,就可以精確的控制小車的避障行為。(三)、單片機(jī)控制模塊此模塊是小車的最重要部分,它控制著超聲波測(cè)距模塊、數(shù)碼管顯示模塊、步進(jìn)電機(jī)控制模塊、語音提示模塊、速度自控模塊和信號(hào)
6、提示模塊的工作。單片機(jī)通過計(jì)時(shí)器記錄超聲波發(fā)射和接受的時(shí)間差,來計(jì)算出小車距離障礙物的距離,控制P1口的高低電平來控制數(shù)碼管顯示,通過輸出不同頻率的脈沖來控制步進(jìn)電機(jī)的工作,通過SPI協(xié)議與ISD1760語音芯片進(jìn)行通信,來控制語音芯片的定點(diǎn)放音,實(shí)現(xiàn)語音提示功能。圖6:?jiǎn)纹瑱C(jī)最小系統(tǒng)四、系統(tǒng)軟件設(shè)計(jì)本設(shè)計(jì)系統(tǒng)軟件采用模塊化結(jié)構(gòu),由主程序、電機(jī)驅(qū)動(dòng)子程序中斷子程序算法子程序構(gòu)成。主程序流程圖如圖2所示。其中:避障中斷服務(wù)子程序完成對(duì)超聲波探測(cè)器產(chǎn)生的外部中斷進(jìn)行處理,如果超出預(yù)定的危險(xiǎn)距離就左轉(zhuǎn)進(jìn)行避障。是否是否初始化驅(qū)動(dòng)電機(jī)利用定時(shí)器中斷每800ms發(fā)送一個(gè)觸發(fā)信號(hào)收到回波信號(hào)計(jì)算障礙物距離
7、障礙物距離小于20cm驅(qū)動(dòng)電機(jī)轉(zhuǎn)向圖7:程序流程圖五、應(yīng)用前景本智能小車系統(tǒng)最誘人的前景就是可用于未來的智能汽車上了。當(dāng)駕駛員因疏忽或打瞌睡時(shí)這樣的智能汽車的設(shè)計(jì)就能體現(xiàn)出它的作用。如果汽車偏離車道或距障礙物小于安全距離時(shí),汽車就會(huì)發(fā)出報(bào)警,提醒駕駛員注意,如果駕駛員沒有及時(shí)作出反應(yīng),汽車就會(huì)自動(dòng)減速或停靠于路邊。這樣的小車還可以用于月球探測(cè)等的無人探月車,幫助我們傳達(dá)月球上更多的信息,讓我們更加的了解月球,為將來登月做好充分準(zhǔn)備。這樣的小車在科學(xué)考察探測(cè)車上也有廣闊的應(yīng)用前景。在科學(xué)考察中,有許多很危險(xiǎn)且人們無法涉足的地方,這時(shí),智能科學(xué)考察車就能夠派上用場(chǎng),在它上面裝上攝像機(jī),代替人們進(jìn)行許多無法進(jìn)行的工作。六、參考文獻(xiàn)1 郭天祥.新概念51單片機(jī)C語言教程入門、提高、開發(fā)、拓展全攻略.北京:電子工業(yè)出版社,20092 宋戈,黃鶴松,員玉良,
溫馨提示
- 1. 本站所有資源如無特殊說明,都需要本地電腦安裝OFFICE2007和PDF閱讀器。圖紙軟件為CAD,CAXA,PROE,UG,SolidWorks等.壓縮文件請(qǐng)下載最新的WinRAR軟件解壓。
- 2. 本站的文檔不包含任何第三方提供的附件圖紙等,如果需要附件,請(qǐng)聯(lián)系上傳者。文件的所有權(quán)益歸上傳用戶所有。
- 3. 本站RAR壓縮包中若帶圖紙,網(wǎng)頁(yè)內(nèi)容里面會(huì)有圖紙預(yù)覽,若沒有圖紙預(yù)覽就沒有圖紙。
- 4. 未經(jīng)權(quán)益所有人同意不得將文件中的內(nèi)容挪作商業(yè)或盈利用途。
- 5. 人人文庫(kù)網(wǎng)僅提供信息存儲(chǔ)空間,僅對(duì)用戶上傳內(nèi)容的表現(xiàn)方式做保護(hù)處理,對(duì)用戶上傳分享的文檔內(nèi)容本身不做任何修改或編輯,并不能對(duì)任何下載內(nèi)容負(fù)責(zé)。
- 6. 下載文件中如有侵權(quán)或不適當(dāng)內(nèi)容,請(qǐng)與我們聯(lián)系,我們立即糾正。
- 7. 本站不保證下載資源的準(zhǔn)確性、安全性和完整性, 同時(shí)也不承擔(dān)用戶因使用這些下載資源對(duì)自己和他人造成任何形式的傷害或損失。
最新文檔
- 2025年中國(guó)FM自動(dòng)選臺(tái)收音機(jī)望遠(yuǎn)鏡數(shù)據(jù)監(jiān)測(cè)研究報(bào)告
- 2025年中國(guó)BOPP鍍鋁膜數(shù)據(jù)監(jiān)測(cè)研究報(bào)告
- 2025年中國(guó)2、5-二甲基苯胺數(shù)據(jù)監(jiān)測(cè)報(bào)告
- 2025至2030年中國(guó)集中操作式電梯井筒模市場(chǎng)分析及競(jìng)爭(zhēng)策略研究報(bào)告
- 2025至2030年中國(guó)鋁合金吸頂燈市場(chǎng)分析及競(jìng)爭(zhēng)策略研究報(bào)告
- 2025至2030年中國(guó)茴香粉市場(chǎng)分析及競(jìng)爭(zhēng)策略研究報(bào)告
- 2025至2030年中國(guó)砼攪拌站市場(chǎng)分析及競(jìng)爭(zhēng)策略研究報(bào)告
- 2025至2030年中國(guó)電力控制開關(guān)柜市場(chǎng)分析及競(jìng)爭(zhēng)策略研究報(bào)告
- 2025至2030年中國(guó)深溝外球面球軸承市場(chǎng)分析及競(jìng)爭(zhēng)策略研究報(bào)告
- 2025至2030年中國(guó)汽車儲(chǔ)液器支架市場(chǎng)分析及競(jìng)爭(zhēng)策略研究報(bào)告
- CLSI EP25-A 穩(wěn)定性考察研究
- SJG 44-2018 深圳市公共建筑節(jié)能設(shè)計(jì)規(guī)范-高清現(xiàn)行
- 職工子女暑期工會(huì)愛心托管班的方案通知
- (5年高職)客戶服務(wù)實(shí)務(wù)(第二版)教學(xué)課件全套電子教案匯總整本書課件最全教學(xué)教程完整版教案(最新)
- 精品中文版b4a新手指南第4章開發(fā)環(huán)境
- 兒科患兒及家屬的溝通技巧
- 光纜線路的故障分析及障礙搶修
- 童聲合唱訓(xùn)練講座
- (防火閥)檢驗(yàn)報(bào)告
- 輸變電工程建設(shè)管理程序指南(共61頁(yè))
- 《屏蔽泵培訓(xùn)講義》
評(píng)論
0/150
提交評(píng)論